Примечание: элевоны (сочетание элерон/руль высоты, используемые в "летающем крыле") также поддерживаются "просто подключите их к первым двум каналам, точно так как это было подключено в RC приемник. Перед калибровкой радио укажите включить элевон-перемешивание в настройках "Mission Planner", перезагрузите программу и плату и вернитесь к процедуре калибровки RC.
Если ваш аппарат имеет V-хвост, это в настоящее время не поддерживает APM на уровне программного обеспечения. Вместо этого, вы можете смешать ваши каналы крена и руля высоты при помощи внешнего аппаратного микшера. Вот хороший и очень недорогой ($ 3) за шт.
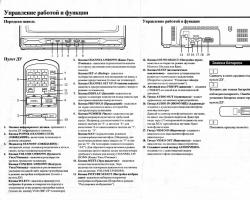
Выходы

Подключите управление сервоприводами и другими устройствами, к APM в соответствующие выходные разъемы, как показано выше.
Четырехканальная конфигурация:
элевонная конфигурация: в англоязычной вики значится по состоянию на 10.04.2013
правильно так:
Установка контроллера в фюзеляж
Когда вы размещаете APM в самолете, очень важно убедиться, что его лицо смотрит в правильном направлении. Какие приметы: Разъемы GPS и приемника должны быть обращен вперед, а серво-кабели обращены назад.
(примечание: есть небольшая стрелка на нижней части платы, которая указывает вперед, на всякий случай)

Советы по монтажу
GPS модуль
Вот пример того, как монтировать APM (и модуль GPS) в EasyStar с использованием шасси 3D Robotics Electronics, доступными с наклонно-поворотным узлом для монтажа камеры или без. Аналогичное шасси также доступно для HobbyKing Bixler
.Шасси:



Первичная настройка APM
Мы рекомендуем использовать программу Mission Planner для первичной настройки APM. (Программа разработана для Windows, но будет работать в Windows VM на Mac OS или в Mono под Linux. Либо, если вы не хотите использовать ничего из перечисленного, задействуйте режим командной строки , который поддерживается в любой операционной системе.)
После того как вы скачали нужную прошивку, убедитесь что указаны правильные номер COM порта и скорость передачи (115k) и нажмите кнопку Connect в правом верхнем углу. Программа Mission Planner подключится через MAVLink.
(Если это первое использование вашего АРМ, сразу запустится форматирование флэш памяти, которое может помешать соединению через MAVLink и появлению сообщения о сбое подключения. В этом случае подождите пару минут и попробуйте подключиться снова.)
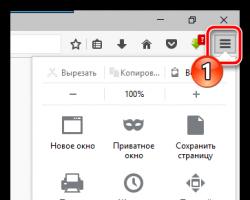
Теперь нажмите кнопку установки, выделенную красным на рисунке:

Откроется окно настройки конфигурации.
Шаги установки
1) Если у вас стандартная конструкция летательного аппарата, загрузите готовую конфигурацию
Для распространённых моделей самолётов, таких как Bixler, Skyfun and Skywalker, подготовлены конфигурационные файлы, которые учитывают особенности этих самолётов. Вы можете скачать их отсюда и использовать программу Mission Planner чтобы записать готовую конфигурацию в APM. Однако, вам всё ещё нужно проверить настройки с учетом оборудования, которое вы используете. Продолжайте выполнять следующие шаги.
2) Откалибруйте входные сигналы вашего радио

Передатчик должен быть включен. Идеально, если вы уже облетали ваш самолет в ручном режиме и сделали необходимые регулировки, в этом случае выходные сигналы радио четко соответствуют настройкам самолёта; если вы ещё не летали на самолёте в ручном режиме и регулировки не выполнены, вам может понадобится повторная калибровка после того, как вы полетаете (перекалибровку легко сделать в поле).
Распределение каналов показано выше. Когда вы двигаете ручки передатчика, соответствующая полоска на экране также будет двигаться. Нажмите кнопку "Calibrate Radio" чтобы установить крайние положения уровней. Появятся красные полоски, и вы должны будете сдвинуть их в крайние положения. Проделать это необходимо для каждого используемого канала.
На этом же экране можно включить реверс сервомашинок, если необходимо, и установить режим элевонов.

3) Установка полетных режимов
Вы можете выбирать разные полетные режимы находясь в полете, с помощью переключателя на радио передатчике, который должен быть подключен ко входу 8 APM. Полная информация о доступных полетных режимах здесь . (Если вам нужно иметь более трех режимов на вашем передатчике, инструкция здесь ) Когда вы меняете положение переключателя, зеленая подсветка переходит на другие уровни. Используйте выпадающий список на каждом уровне, чтобы назначить этот режим на функцию. Заметьте, что режим 6 не может быть изменен и должен остаться Manual. Это "аппаратный ручной режим", который означает, что он контролируется контуром failsafe платы APM, таким образом реализуется возможность вернутся к радио управлению в качестве меры безопасности.

4) Конфигурация оборудования
В этой вкладке вы можете указать плате APM какие опциональные сенсоры вы подключили. Просто включите флажок соответствующий сенсору, который вы используете. (В данный момент сонар не поддерживается APM; главным образом он используется для ArduCopter)

Для магнетометра (компаса), у вас есть выбор опции калибровки, когда вы его активируете:
1. Вы можете ничего не делать, и в этом случае управляющая программа попытается выяснить смещение и магнитное склонение, сравнивая показания компаса с данными GPS и IMU во время полета. Плюс: Не требует усилий. Минус: Потребуется несколько минут полета, чтобы компас начал работать правильно, поэтому в первый запуск компас работает ошибочно.
2. Ручная калибровка в программе Mission Planner (выше). Вы можете указать ваше магнитное склонение по инструкции ниже и затем нажать кнопку "Live Calibration", затем перемещать и поворачивать ваш самолет 30 секунд пока запишутся данные и выполнятся некоторые математические операции для калибровки сенсора. Плюсы: Это работает. Минусы: это немного затруднительно, особенно для больших самолетов. Кроме того такая калибровка не учитывает магнитных помех, которые может вызывать мотор во время полета.
3. Воспроизвести лог полета. Это классная опция, показанная выше как Log Calibration, где вы можете просто воспроизвести предварительно сохраненный лог полета (.tlog) и управляющая программа сравнит данные GPS и IMU с данными компаса и сделает необходимые корректировки. Плюсы: Работает великолепно. Минусы: Вы должны уже были летать, и если вы загрузите файл.tlog где вы в действительности не летали, вы спутаете ваши калибровки и должны будете провести их снова, или рискуете получить плохие полетные характеристики.
Чтобы вручную ввести магнитное склонение для вашего географического местоположения, вы должны найти правильное значение, нажав на ссылку и открыв браузер. Выберите ваше положение и вы получите магнитное склонение, как выделено ниже.
И не писал обзоры, от части из за не хватки времени, от части из за ситуации в Украине:(
В общем выдался свободный вечер и решил написать обзор, по моему любимому контроллеру , так как набралось большое количество видео материала по настройке и сборке.Но думаю писать я буду по минимум, за то будет очень много видеороликов, не зря же я столько работы проделал:)Нус, начнемс.
Контроллер АРМ на сегодня самый многофункциональный и не дорогой, его используют чаще всего на мультикоптерах (прошивка Arducopter) и на самолетах (прошивка Ardupilot) а также поддерживает автомобиль и вертолет, в общем вот платформы которые поддерживает контроллер:У АРМ самое большое количество полетных режимов из всех контроллеров что есть на рынке, возможность управлять дроном с помощью смартфона или планшета, при этом открывается огромный функционал: создание полетного задания, управление, переключение режимов, мониторинг и телеметрия с указанием всех данных, и многое другое… Минус этого контроллера в том, что он не летает из «коробки», а требует знаний и серьезной подготовки.Но я в своих видео максимально просто и подробно постарался объяснить от А до Я, надеюсь поможет новичкам, и будет полезен людям кто решил освоить АРМ.
В данной статье и видео будет рассмотрено подключение контроллера к квадрокоптеру, в дальнейшем будет такой же видео курс по Ardupilot то есть по установке на самолет.
В апреле месяце появился на Бангуде полный комплект за соблазнительные 137 доллара, на то время это была наверное самая низкая цена за такой комплект.
Я конечно ожидал подвоха за такую цену, но жабка одобрительно кивнула и ее в последствии не разочаровал, комплект оказался качественным, и все сразу работало.Посылка дошла очень быстро, даже двух недель не прошло.
Комплект поставки в себя включал: контроллер АРМ уже с коробочкой, демпферная площадка под контроллер,GPS модуль с магнитометром в корпусе и со стоечкой, радиотелеметрия 433мГц,Minimosd и Power Module, не плохо за такую сумму:) (видео с распаковкой и комплектацией выше в начале статьи) Единственное чего нет в комплекте, и будет нужно для прошивки ОСД это FTDI программатор, его можно купить там же на Бангуде,

Первое что желательно сделать это прошить PPM-encoder, это нас сразу убережет от дальнейших танцев с бубном.В любом случае всегда желательно залить свежую прошивку PPM-encoder для правильной отработки при фалсейве.Инструкция по прошивке:
Так же можно сразу залить правильный конфиг в модуль GPS, хоть в данном наборе ГПС работал нормально, я все равно перестраховался.Инструкция по настройке GPS:
Приступаем к сборке, подключению и прошивке самого контроллера.Подробно в этом видео:
После подключения и прошивки, необходимо настроить Пиды квадрокоптера.
Простая настройка PID значения Pitch and Roll с помощью крутилки на аппаратуре:
После настройки пидов, пришло время подключить радиотелеметрию.Подробно о использовании телеметрии с смартфоном или планшетом, а так же о полетных режимах и настройки Фалсейва:
Теперь после всех настроек можно подключать Power Module, но его мы будем использовать только как датчик тока.Видео о настройке и по подключению:
Пред подключением ОСД и использования квадрокоптера для FPV полетов, стоит задуматься о правильном питании контроллера.Так как все отказы АРМ происходят именно из за плохого питания.Подробно о правильной запитке контроллера:
Настало время подключить MinimOSD.Подробно о прошивке, настройке и подключению:
Теперь можно летать и радоваться:)
Надеюсь вам понравился мой вариант статьи: Мало букаФ-Много фильмов:)
Пройдя поэтапно все настройки согласно моих видеоинструкций, вы наверняка взлетите.Думаю видео материала вам будет достаточно для постижения дзена контроллера АРМ, и целого дня чтоб все пересмотреть.
Ставим лайки кому понравилась проделанная работа по видеоурокам, а так же чтоб у меня был стимул сделать подобный курс по Ардупилоту.
Это руководство быстрого старта для пользователей. прошивка квадрокоптер уже загружена на APM 2.6
перейдите на страницу загрузки и выберите самую последнюю версию.
установите программу
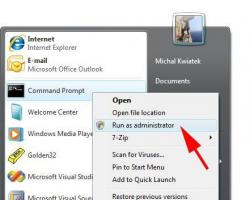
Следуйте инструкциям до завершения установки программы. В процессе установки программа автоматически установит необходимые драйвера. Если у Вас возникает ошибка DirectX , то необходимо его обновление. Если вы получаете предупреждение, как показано на картинке ниже, выберите Установить драйвер для продолжение установки программы.

После установки программы запустите её, она автоматически информирует вас, если есть обновления. Пожалуйста используйте по возможности самую последнюю версию Mission Planner


После скачивания и установки Mission Planner на вашу наземную станцию, подключите APM к компьютеру используя микро-USB провод. Не подключайте провод к USB-хабу, подключайте провод к компьютеру.

После установки Mission Planner подключите через micro-USB APM с системой Windows, которая автоматически определит и предоставит драйвера для устройства, запустите программное обеспечение и выберите порт который будет указан в списке, выберите необходимую скорость (по умолчанию это 115200 бод/с) как показано на рисунке
Выберите “соединение” в правом вверхнем углу экрана, что бы загрузить параметры MAVLINK в APM , Mission Planner будет показывать окно с параметрами загрузки данных.

Когда инициализация параметров пройдёт окно загрузки пропадёт.

Включите передатчик и убедитесь, что он в режиме самолета (Полетному контроллеру необходим режим полета, независимо от платформы на эксперементальной основе) и установите все стики по центру.
Левая ручка будет контролировать газ (THR) и рысканья (Yaw), правая будет контролировать крен (Roll) и тангаж (Pitch) . Трехпозиционный переключатель будет контролировать режимы полета.
В Mission Planner выберите “Radio Calibrating” , нажмите на “калибровка” и правом нижнем углу, Mission Planner выведет окно, что батарея не должна быть подключена, как и моторы с пропеллерами.

Нажмите “ок” и начните двигать стиками в каждую из сторон до предела, а так же трехпозиционный тумблер. наблюдайте за результатами, красные линии установят пределы минимамльного и максимального значения вашего радиопередатчика.

Когда все значения каналов радио смогли показать свой минимум и максимум нажмите в программе “Done”. Данные вам отобразятся в отдельном окне, нормальное значение около 1100 для минимума и 1900 для максимума.

Винты должны быть прекреплены в соотвествии с конфигурацией, они устанавливаются в самую последнюю очередь, после того, как все настроено. ниже приводится схема и направление пропеллеров и стороны кручения моторов.
Конфигурация квадрокоптер X и Plus Конфигураци Квадрокоптер H рама Конфигурация
Квадрокоптер H рама Конфигурация Трикоптер Y Конфигурации
Трикоптер Y Конфигурации Гексакоптер и октакоптер Конфигураци
Гексакоптер и октакоптер Конфигураци трикоптер Y6
трикоптер Y6 

Безопасность это ключ в успешном полете. Пожалуйста изучите информацию по безопасным полетам перед полетами. Выберите безопасную площадку для полетов подальше от людей и всегда проверяйте работу всех органов управления и крепления перед подключением батареи. Прочтите вики раздел «первый полет» по снятию с охраны (arming) и постановке на охрану (disarm) квадрокоптера, так же по управлению и вариантам полетов.
Когда все готово для полетов, установите квадрокоптер на взлетной площадке лицом от вас. Подключите заранее заряженную LiPO батарейку к разъемам. Следуйте безопасному снятию с охраны, что бы это не повлекло «сумаcшедший полет» (вики)

Последнее это подключение батарейки (предварительно включив аппаратуру со стиком газа утопленного в минимум)
APM поддерживает различные GCS.
В настоящее время доступны для загрузки следующие варианты:
APM Mission Planner
APM Mission Planner программа позволяющая настраивать и управлять БПЛА на основе APM .
Подробно о том как ее использовать тут.
Режимы автопилота
Ardupilot имеет ряд встроенных полетных режимов, и будет иметь еще больше по мере развития. Ardupilot может выступать в качестве простой системы стабилизации полета или выполнять сложное автоматическое пилотирование. Режимы полета контролируется по радио или с помощью логики, заложенной в events.pde файл.
Для настройки соответствия переключателей на радиопередатчике режимам автопилота следует настроить "Flight Modes", используя программу "Mission Planner" или через текстовый терминал : (Setup/Modes).
Режимы:
Ручное управление. Каналы с радиоприемника передаются напрямую на приводы.
STABILIZE
Режим стабилизации, в этом режиме управление по крену и тангажу ассистируются от автопилота, если отпустить эти ручки - самолет автоматически придет в состояние горизонтального полета, Газ управляется напрямую с приемника.
FLY BY WIRE_A
Автопилот отклоняет самолет на точно на углы отклонения рычагов управления креном и тангажем, газ управляется вручную, но ограничен значениями определенными в параметрах THR_MIN и THR_MAX, по умолчанию THR_MIN = 0. но при желании вы можете это значение увеличить, однако следует понимать что если вы активируете режим FLY BY WIRE_A (даже на земле) то мотор будет запущен. Этот режим отлично подходит для обучения новичков пилотированию.
FLY BY WIRE_B
Требует наличие сенсора воздушной скорости, автопилот автоматически управляет пикированием и газом для достижения постоянного эшелона, сменить эшелон возможно рычажком тангажа.Режим отлично подходит для тестирования настроек контролирующих высоту.
Автоматическое следование по предварительно запрограммированным точкам, допускает возможность настройки допускающей ручное подруливание. При прерывании режима продолжает выполнение миссии, следует к очередной точке, если все точки однажды пройдены то переходит в режим RTL, для повтора маршрута требуется перезапуск контроллера/команда по радио
Самолет автоматически возвращается к точке запуска и встает в круг на определенной высоте, допускается ручное подруливание.
Самолет становится в круг в текущей позиции, определенной данными системы спутниковой навигации. Это позволяет компенсировать снос ветром.
* "Подруливание": Предположим, модель самолета летит в одном из автоматических режимов и при этом возникает ситуация требующая срочного маневра. Вы можете использовать рычаги управления креном и тангажем для совершения маневра, после того как рычаги отпущены самолет продолжает управляться автоматически.
Дополнительные режимы
Автоматический взлет может быть задан при планировании миссии и активирован выбором режима AUTO. Автоматически удерживает взлетный тангаж, горизонтальное положение по крену. В последних версиях прошивки существует возможность настройки использования руля направления и привода рулевого колеса на этапах взлета и посадки. Метод управления газом определяется версией прошивки. Газ ограничен параметром THR_MAX. Самолет сохраняет этот режим до тех пор пока не будет достигнута высота указанная при планировании миссии, а затем переходит в автоматическую фазу следования по точкам.
Примечание от переводчика: В ранних версиях прошивок, начиная с ардупилот-мини (ardupilot legacy) управление газом на этапе взлета было действительно вручную что соответствует описанию в английской версии википедии, что логично и безопасно. тем не менее в arduplane2.6.8 актуальной на момент перевода установлена логика значение использовать полный газ на этой стадии.
Автоматическая посадка может быть задана при планировании миссии и активирована при достижении последней маршрутной точки. Газ контролируется автопилотом. При вхождении в радиус последней точки фиксируется текущий курс самолета, а при достижении высоты 3м над высотой указанной для точки посадки (или за 2 секунды до достижения координат посадочной точки) отключается газ. Тактика управления креном, тангажем определяется наличием датчика воздушной скорости, настроек параметров и версии прошивки.
в свежих прошивках появился параметр RUDDER_STEER Если включен то элероны работают на соблюдение горизонта в ходе взлета и посадки, руль направления (и рулевое колесо если есть) отклоняются для контроля курса