Это было почти 15 лет тому назад, в то время были распространены коллекторные моторы. Бесколлекторные двигатели и контроллеры скорости только начинали появляться и стоили очень дорого. Тогда мне очень нужен был регулятор скорости (ESC) для коллекторного мотора радиоуправляемой машинки. Озадачился этим вопросом и нашел схему, которую самостоятельно мог бы собрать. Детали некоторые были в наличии, что-то прикупил в магазине радиодеталей, все вышло достаточно дешево. Сейчас стоимость нового регулятора не так высока, как раньше, порой бывает дешевле купить, но моделист не ищет легких путей.
Схема регулятора следующая.
Регулятор работает от 6 до 15 В. Управляющий канал 4,8 - 6 В
Контроллер решил сделать на монтажной плате. Хотя ее можно было и вытравить в кислоте (рисунок был). Для этого потребуется однослойный стеклотекстолит.

Транзисторы
T 1 = BD 676 или BD 678
T 2 = BD 675 или BD 677
T 3 = BD 676 или BD 678
T 4 = BD 675 или BD 677
Резисторы
P 2 = 250 кОм
Сопротивления
R 7 = 2.7 кОм
Конденсаторы
C 3 = 0,010 мФ
Микросхема

Первые тесты показали, что транзисторам приходится очень тяжело, в пиках наблюдались достаточно большие нагрузки. В связи с этим они были выпаяны с платы, приведенным в спецификации транзисторам подобраны более мощные аналоги по каталогу (КТ853В и КТ829А).

Так как при повышении нагрузок выделяется тепло, то его нужно куда-то отводить. Для этого подобрал радиатор. Радиатор использовал от компьютера, старый и ненужный все равно валялся без дела, а тут пригодился. Вентилятор с него решил не снимать, так как источник питания 12В, то подключил напрямую к силовой батарее. Транзисторы прикрутил к радиатору с помощью винтов.

Радиатор распилил на две части, это было необходимо по конструктиву схемы.

Длинные шпильки сверху держат кулер, а с другой стороны прижимают к радиатору транзисторы для эффективного охлаждения. Снизу в качестве изолятора закрепил пластинку стеклотекстолита.
Регулятор нужно откалибровать с помощью переменных резисторов, они позволяют настроить регулятор. Первый отвечает за нулевое значение, второй за максимальный газ. Переводим стик газа в соответствующую позицию и настраиваем регулятор.
В собранном виде все выглядит так.

Для создания миниатюрных моделей с малыми нагрузками охлаждение не требуется. Контроллер без радиатора получился размером 25 Х 25 мм, что достаточно компактно.
Если ESC подвергать высоким нагрузкам, то, безусловно, требуется система охлаждения.
Данный регулятор был установлен на радиоуправляемую машинку вместо электро-механического переключателя. В целом регулятор оправдал ожидания и до сих пор выполняет свою функцию.
Что такое регулятор (контроллер) скорости и для чего он нужен можно почерпнуть из предыдущей статьи про . А сегодня речь пойдет о типичных настройках регулей и способах их изменения.
Это основные настройки. У некоторых специфичных моделей (особенно дорогих), могут быть и другие возможности настроек, которые обычно указываются в инструкции на регулятор.
Вариантов программирования ESC несколько:
Покажу как программируется регулятор на примере карты для регуляторов Hobbywing, которая также подходит и к регуляторам RCtimer. Для регуляторов со встроенным стабилизатором достаточно просто подключить управляющий шлейф регулятора к разъему "BEC" на карте программирования, затем подключить к регулятору аккумулятор. Через несколько секунд на карте загораются лампочки и показывают текущие настройки.

При программировании регуляторов без стабилизатора питания, или с отключенным проводом питания, необходимо подать на карту программирования питание со стороны. Это можно сделать, например, с приемника, или еще откуда-нибудь. Напряжение питания: 5-6 Вольт. Мне показалось удобней всего использовать для этих целей кассету под АА аккумуляторы с разъемом под приемник, вот эту . В остальном процесс ничем не отличается.

Ну вот, про программирование ESC написал, теперь можно со спокойной совестью программировать свои 6 регуляторов для квадрика. 🙂
Регуляторы оборотов — в англоязычном сообществе называются — Electric Speed Controller (электронный контроллер скорости) или сокращенно — ESC. Основная задача ESC – передача энергии от аккумулятора к бесколлекторному мотору. Потребность в их применении возникла вследствие некоторых особенностей БК — мотора. Вкратце говоря, аккумулятор отдает постоянный ток, а бесколлекторный мотор принимает трехфазный переменный ток.
Связь с остальными компонентами мультикоптера.
На вход ESC подается напряжение с аккумулятора и сигналы от полетного контроллера, а на выход регулятор отдает управляющее напряжение для привода. Соответственно регулятор должен обеспечивать:
*Простейшая схема подключения.
Дополнительно к основной функции, регуляторы оборотов могут так же передавать питание к другим узлам дрона: полетному контроллеру, сервоприводам и так далее. Это достигается внедрением в регулятор блока исключения батареи — Battery Eliminator Circuit (далее как — BEC).
Использование BEC значительно упрощает конструкцию дрона, однако такая схема обладает рядом минусов. Блок исключения батареи может перегреваться при больших перепадах напряжения и больших нагрузках. К тому же регуляторы оборотов с BEC, как правило, стоят дороже, чем регуляторы без блока.
Согласитесь, логичнее и дешевле было бы сделать отдельно ESC и отдельно один BEC. Такое решение есть и называется оно универсальный блок исключения батареи (Universal Battery Eliminator Circuit, далее как — UBEC).
UBEC — подключается напрямую к аккумулятору и питает нужный узел дрона. Преимущества такого подхода весьма существенны:
BEC бывают двух видов: линейные (LBEC) и импульсные (SBEC).
Учитывая то, что многие производители устанавливают на свои UBECLC фильтры (а, если фильтра все-таки нет, то его можно дешево купить и легко установить), профессионалы используют в своих коптерах именно регуляторы SBEC.
Поскольку регулятор оборотов выполняет некоторые преобразования с высокой частотой и может быть настроен на различные режимы работы для него пишут отдельный софт, называемый прошивкой. Это позволяет исправлять прошлые ошибки в алгоритмах управления, создавать более совершенные прошивки (и тем самым, например, уменьшать расходы аккумулятора на среднем газу) и производить гибкие настройки. В коптерах известных компаний типа DJI смена ПО регулятора происходит автоматически при помощи полетного контроллера.
Внимание! Перезапись ПО для регуляторов скорости может повлечь за собой поломки дрона различного характера, а так же снятие с гарантийного обслуживания! Помните, что вы делаете это на свой страх и риск!
Сменить программное обеспечение регулятора можно несколькими способами:
Третий вариант проще и в настоящее время активно внедряется в новые модели.
Исходя из всего вышеперечисленного, можно выделить особые критерии выбора регулятора оборотов для дрона:
Если вы когда-либо задумывались над тем, для чего нужны разные компоненты контроллера, то в статье Джонатана Фелдкампа из Castle Creations вы узнаете о назначении его компонентов, а так же о том как осуществляется управление двигателем. Обладая этими знаниями вы будете лучше понимать какие технологии используются в контроллерах и сможете лучше подобрать модель, подходящую для вашего применения.
Примечание к переводу:
Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Прежде чем мы перейдем непосредственно к контроллеру, полезно будет посмотреть как устроен мотор с точки зрения электричества. Типичный бесколлекторный мотор имеет три обмотки (фазы), будем называть их A, B, C. Фазы могут быть соединены методом «звезда» и методом «дельта».
Схема подключения обмоток бесколлекторного мотора.
На картинке проводники образуют обмотки (фазы) и заканчиваются выводами. Хотя соединения обмоток сильно отличаются внешне, в плане электричества разница не большая.
Важно понимать, что все что мы делаем с фазами A и B, оказывает влияние на фазу С. Почему это важно, мы рассмотрим чуть позже. Так же обратите внимание, что в отсутствие каких-либо внешних сил (например, переменного магнитного поля), фазы это просто замкнутые куски провода, именно такими они являются для контроллера во время запуска мотора.
Работа контроллера заключается в том, чтобы передать мотору энергию батареи. Для передачи энергии контроллер использует MOSFET’ы — силовые ключи, которые могут открываться и закрываться за долю секунды. Условно схему бесколлектрной системы можно представить в сл. виде:
Картинка показывает, что закрывая ключи А и В, которые отмечены красной звездочкой, мы пускаем ток от точки +In через фазы А и В на землю. Ток, протекающий через фазы (они же обмотки), создает магнитное поле, которое притягивает или отталкивает магниты ротора и, таким образом, вызывает вращение.
Вызвать проворот мотора очень просто, можно просто подключить любые две фазы мотора напрямую к аккумулятору. (Очевидно, что делать этого не стоит, испортите батарею или мотор, если оставите батарею подключенной более чем на тысячную долю секунды. Отсюда следует еще одна из основных задач контроллера — ограничить ток протекающий через фазу при коммутации.) Фокус поддержания вращения в том, что бы открыть два нужных ключа в нужный момент времени и тут же закрыть ключи, пока ситуация не вышла из-под контроля. Пока ток протекает по обмотке, магнит ротора притягивается к обмотке (полюс S к N или N к S), тянет за собой ротор и поворачивает его. Как только магнит проходит обмотку, мы открываем другие ключи так, что бы теперь отталкивать магнит ротора (N от N или S от S) и проталкивать магнит по направлению вращения дальше от этой обмотки. Теперь повторите эту идею для всех трех обмоток и станет ясно, как заставить ротор с магнитами продолжать вращаться. Как только вращение началось, нам остается только переключать обмотки снова и снова, что бы поддерживать этот процесс. Для реального примера рассмотрите следующую фотографию типичного контроллера:
Ключи контроллера.
На фото хорошо видны шесть полевых транзисторов MOSFET, которые используются для включения и выключения фаз. Еще видны провод подключения к приемнику и большой конденсатор, который служит накопителем энергии для контроллера. Мелкие детали это различные фильтры, который нужны для правильной работы контроллера. Мощная пайка контактов обеспечивает протекание больших токов. На следующей иллюстрации поверх фотографии нанесено изображение ключей:

Схематическое изображение ключей.
Теперь, когда мы получили представление о том, как поддерживать вращение бесколлекторного мотора, давайте рассмотрим функциональную диаграмму всего контроллера. В контроллере выделяются четыре основных блока: силовые ключи MOSFET, цепь управления ключами, микропроцессор и цепь определения положения ротора. Схема показывает, как эти части соединены между собой.
Теперь у нас есть представление о том, как работает силовая часть регулятора: MOSFET’ы работают как ключи, открываясь и закрываясь они вызывают протекание тока через обмотки мотора. Иногда мощности одного ключа недостаточно, для мощных регуляторов используются несколько ключей включенных параллельно. Нагрев регулятора практически полностью вызван внутренним сопротивлением ключей, каждый раз увеличивая кол-во ключей на фазу в 2 раза мы соответственно снижаем общее сопротивление ключей в 2 раза. Как альтернативу использованию нескольких параллельных ключей, можно устанавливать более качественные ключи.
Управление ключами не такая простая задача, как может показаться на первый взгляд. Если посмотреть на электрическую схему, мы обнаружим, что у ключей три контакта. Контакт, по которому ток втекает в транзистор, называется «исток», контакт, по которому ток вытекает, называется «сток», контакт, который отходит в сторону называется «затвор», это переключатель ключа. Для того, что-бы открыть ключ, необходимо на затвор подать напряжение на 5В-10В выше чем подведено к истоку транзистора. Для нижней части ключей (которые подключены к отрицательному контакту батареи) это относительно просто, нам надо подать всего 10 вольт. Для того, что бы открыть верхние ключи, которые подключены к положительному контакту батареи, нужно приложить напряжение на 10 вольт выше чем напряжение силовой батареи. К примеру, если у нас батарея LiPo 4S, к верхнему транзистору подведено напряжение 14.8В, но для того, что бы открыть ключ, к затвору нужно подвести напряжение в 25В. Разработчики регуляторов используют готовые блоки управления ключами, или разрабатывают собственные.
Для того, что бы знать, когда открывать и закрывать ключи, регулятор должен знать положение магнитов ротора вращающегося мотора. Это самая хитрая функция регулятора и именно поэтому раньше моторы и регуляторы использовали дополнительные датчики определения положения ротора (схема с сенсором до сих пор популярна в автомодельном хобби). Бессенсорные регуляторы, как видно из названия, обходятся без сенсора и используют уникальный алгоритм определения положения ротора: в каждый момент времени регулятор использует только 2 фазы для питания мотора, третья фаза при этом полностью отключена. Вращающееся магнитное поле наводит ЭДС в третьей обмотке. Измерив и проанализировав наведенное напряжение, можно определить как далеко провернулся магнит, и понять когда нужно закрыть текущую пару ключей и открыть следующую.
Без сомнения, микроконтроллер это мозг всего процесса. Принцип его работы во многом схож с обычным компьютером: программисты пишут программу, компилируют и загружают ее в память контроллера. Микроконтроллер выполняет программу и в соответствии с ней посылает управляющие сигналы в цепь управления ключами, определяет положение мотора, обрабатывает сигналы с приемника, вычисляет требуемую выходную мощность и мигает светодиодом. Обработка сигнала с приемника стандартна. Управляющий сигнал это серия импульсов, длина которых определяет выходную мощность. Ширина импульса в 1мс означает полностью убранный газ, 2мс — полностью открытый. Величина частичного открытия газа определяется шириной импульса между этими двумя значениями. Внешне все просто, но микроконтроллеру важно при этом еще и успевать отслеживать положение мотора, что бы не пропустить момент переключения ключей.
Работа мотора на среднем газу гораздо более сложный процесс, нежели работа на полном газу. Вместо того, что бы оставить два ключа открытыми на определенное время, микроконтроллер открывает один ключ и быстро начинает открывать и закрывать второй. На малом газу второй ключ закрыт большую часть времени, в то время как при приближению к полному газу, он открыт почти все время. Частота, с которой контроллер открывает/закрывает второй ключ, называется PWM-частотой.
Кроме деления по возможностям настройки, регуляторы так же делятся по физическим возможностям. Некоторые регуляторы рассчитаны на напряжение питания 12В, в то время как другие поддерживают батареи до 90В. Впрочем, с точки зрения микроконтроллера и его программы, задача одна и та же — переключать ключи по мере вращения ротора. Наиболее очевидное изменение, это детали, которые используются на печатной плате. FET’ы должны быть рассчитаны на более высокое напряжение, что зачастую, означает, что они имеют более высокое сопротивление, а стало быть не так хороши. Блок управления ключами должен иметь возможность поднимать напряжение еще выше и управлять бОльшим количеством ключей. Входные конденсаторы должны быть другими, обычно значительно больше по размеру. Проще говоря, каждый элемент регулятора должен быть проверен на соответствие высокому напряжению. Кроме очевидных вещей с ростом напряжение многое становится несколько более проблемным. Небольшие скачки напряжения при переключении, которые на 12 вольтах не играют никакой роли, с ростом напряжения могут быть достаточно большими, что бы открыть ключ, который не должен быть открыт в данный момент. (Представьте себе, что ключи на верхнем и нижнем уровне открыты в один момент времени — это равносильно короткому замыканию батареи.) Контроллеру требуется дополнительная аккуратность при работе с входным сигналом, что бы все операции проходили правильно.
Другая сложность с высоким напряжением это BEC. Вспоминаются те далекие времена, когда все пользовались двигателями внутреннего сгорания в качестве силовой установки, а для питания бортовой электроники было достаточно небольшой батареи. Когда электрическая тяга и регуляторы стали более популярными, в них стали встраивать небольшой линейный блок питания бортовой электроники — BEC, который создает источник тока напряжением 5В и может заменить батарею бортового питания. Простой BEC отлично работает с сервоприводами, которые не потребляют много тока, и особенно хорошо работает при небольшом напряжении силовой батареи. Проблема обычного BEC в том, что он переводит излишек напряжения в тепло. Если у нас силовая батарея 12В, то от 6В надо избавиться. Если наши сервоприводы потребляют 1А тока, то 6Вт будет переведено в тепло. Если же у нас батарея 25В, то уже 20В надо перевести в тепло и при токе в 1А, мы получим уже 20Вт тепла. Это слишком много для линейного BEC и он просто перестанет работать при такой нагрузке.
Следующим шагом в развитии стало появление импульсных BEC. Импульсные BEC работают аналогично контроллерам, используют FET ключи для быстрого включения и выключения питания от батареи, далее полученные импульсы сглаживаются для получения на выходе постоянного напряжения. Наиболее важное преимущество импульсного BEC это то, что излишек напряжения не переводится в тепло, а КПД может легко достигать 90%.
Теперь, когда мы знаем несколько больше о том, как работает ESC, нам проще выбрать правильный контроллер для нашего применения. Предположим, что мы уже выбрали мотор и батарею. Теперь нам надо прикинуть, какой ток будет потреблять наша силовая установка. Выбирайте контроллер, который имеет рейтинг выше чем ток полного газа (к примеру если 67А это худший случай, то контроллера на 75А будет достаточно). Стоит сказать, что нет никакой проблемы в том, что бы использовать контроллер, превышающий ваши потребности, если он не утяжеляет вашу модель.
После сборки полезно сделать коротки пробный полет и проверить температуру контроллера, затем сделать более продолжительный полет и проверить температуру еще раз, что бы убедиться, что она не выходит за безопасные рамки. Температура контроллера должна оставаться ниже 85С и регулятор не должен шипеть, если прикоснуться к его корпусу смоченным пальцем. Калькуляторы силовых установок могут ошибаться, и каждый вертолет летает немного по-разному, поэтому дополнительная осторожность при первых полетах не повредит.
Как вы видите, контроллеры имеют относительно простую конструкцию, однако хорошее программное обеспечение и качественные компоненты жизненно важны для правильной работы. От правильного выбора контроллера зависит, будет или не будет модель обладать дымовым эффектом, которого вы, возможно, вовсе и не желаете;-). Отдельное спасибо Джонатану Фелдкампу и команде Castle Creations за их вклад в наше хобби.
Прежде чем мы рассмотрим, почему работа на среднем газу может увеличить потребление тока, нужно кратко рассмотреть явление обратной ЭДС (back EMF-electromotive force). Во время работы мотор не только потребляет энергию, создавая вращение, но и работает как генератор, вырабатывая электроэнергию — обратную ЭДС. (Примечание aarc: Если предположить, что мотор не имеет внутреннего сопротивления, не теряет энергию на трение и вращается без нагрузки, то он будет набирать обороты до тех пор, пока не сравняется напряжение подводимое от батареи и величина обратной ЭДС, после чего потребление тока станет равно нулю, а ротор продолжит вращаться с постоянной скоростью. Если теперь нагрузить мотор, например заставить вращать ротор вертолета, то появится эффект проскальзывания, когда ротор будет вращаться медленнее, чем мог бы при данном напряжении, а величина подводимого тока будет больше чем ток обратной ЭДС. Эта разница токов и совершает полезную работу. (http://en.wikipedia.org/wiki/Brushless_DC_electric_motor) В результате мотор работает с проскальзыванием, из-за того, что часть энергии идет на совершение полезной работы, а часть на преодоление обратного тока, и чем выше нагрузка, тем сильнее проскальзывание и больше тока потребляет мотор.
Работа на среднем газу или в режиме гувернера(тот же средний газ) нагружают контроллер, несмотря на то, что он дает более короткие импульсы питания, тем не менее под нагрузкой ток импульсов увеличивается. При снижении оборотов обратная ЭДС уменьшается и разница токов обратной ЭДС и мгновенных импульсов питания может быть очень большая. Ватт-метры не могут показать эти броски тока, а отображают только средние значения.
Для прошивки вашего регулятора скорости ESC понадобятся программное обеспечение и специальные устройства. Также необходимы знания о соединениях и специфичных установках. Далее будет рассказано о всех необходимом для прошивки и самом процессе.
Обычные регуляторы имеют внутри программный и аппаратный фильтры, сглаживающий реакцию на резкие скачки управляющего воздействия. Применительно к моделям самолётов и вертолётов — всё правильно, резко изменять газ совершенно ни к чему. Однако, принцип стабилизации мультироторных аппаратов основан на изменении тяги каждого ротора в отдельности. Чем более отзывчив будет регулятор, тем лучше будет стабилизация, меньше колебания, и т.п. Хорошо иллюстрирует это следующее видео от Дмитрия piranha:
И вот ещё один показательный пример.
Ещё один минус «родных» прошивок регуляторов — низкое разрешение. Т.е. регулятор весь диапазон оборотов проходит за, к примеру, 100 шагов. Кастомные прошивки обеспечивают большее разрешение.
Стоит отметить, что после перепрошивки регулятор теряет бОльшую часть своих функций. Не надо спрашивать — а как настроить отсечку, или — а где настраивается софтстарт. Этих функций просто нет. Прошитые регуляторы предназначены исключительно для работы на мультироторах. Исключением можно считать прошивку BLHeli — там пока что присутствуют фишки «фабричных» регуляторов.
Устройство программирования.
Вам понадобится дополнительный программатор. Программатор будет подключаться к определенным точкам на ESC для подключения к компьютеру. Существует несколько версий этих программаторов, различных брендов и различного ценового диапазона. Примерная стоимость адаптера 15$
There are several versions of these programmers from different brands and in different price ranges. You should be able to find an adapter around 15$.
Вы можете использовать следующие адаптеры USBasp:
HobbyKing: USBasp AVR Programming Device for ATMEL processors
GoodLuckBuy: USB-ASP Atmel ISP Programmer Download Adapter
ProtoStack: USBASP AVR Programmer
CuteDigi: AVRISP STK500 programmer
Драйвера:
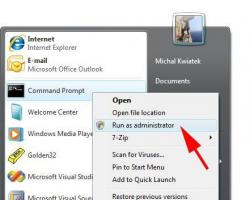
Для Linux и MacOS X не требуются драйвера. А для работы под Windows нужно будет установить драйвер для USBasp:
Также, вам нужно будет подключить программатор к ESC. Можно подсоединяться к ножкам микросхемы или припаять провода к плате регулятора.
В зависимости от установленной системы на вашем компьютере, вам нужно будет установить подходящую программу для прошивки ECS.
Программы для прошивки:
Если на вашем регуляторе есть контакты для прошивки, можете припаять провода к ним или временно подключиться с помощью пинов как на видео ниже. I
Или вы можно использовать подключение к ножкам микроконтроллера с помощью микро зажимов :

Другой метод, изготовить адаптер для программирования с помощью модельного клея. Детально процесс изготовления этого адаптера описан .

Другой похожий адаптер для Amtel Atmega теперь продается в Hobby King :

Связь между ESC и программатором осуществляется по шине последовательного периферийного интерфейса (SPI) . Необходимые соединения в шине называются . Вам нужно правильно подключить пины на ESC и на программаторе.
Термин fuses (перев. предохранители) не имеет ничего общего с защитными устройствами в обычной электронике.В данном случае термин фьюз относиться к небольшой части микроконтроллера. Микроконтроллер меняет свое поведение в зависимости от того какие фьюзы выставлены. Неправильно выставленные фьюзы могут привести к непредсказуемым последствиям. Функции фьюзов перечислины в документации к микроконтроллеру (datasheet). Последние прошивки от Simonk не требует вносить изменения в фьюзы.
Фьюзы могут быть вычислены или определены с помощью калькуляторов.Например, Engbedded Atmel AVR® Fuse Calculator
Прошивки для ESC доступны в форме .hex файлов. Один.hex файл содержит полную прошивку для определенного ESC.Вы можете прошить ESC несколько раз, но только последняя залитая прошивка будет активной. Неправильная прошивка может испортить ESC при подаче питания от аккумулятора. Поэтому важно безопасно проверять ваш ESC после обновления прошивки.
В ESC применяются ключи типа P или N, а могут применяться оба типа. Регуляторы с ключами типа-N обладают меньшим сопротивлением, меньшими потерями и большей эффективностью. Совместимость.hex файла зависит от типа установленных силовых ключей.
Как определить тип силового ключа FET:
Разъем Atmel ISP бывает двух видов, 6-пиновый или 10-пиновый. Ваша задача подключить проводники на ESC (MOSI, MISO, SCK, VCC, RST & GND ) к таким же проводникам на программаторе.
6-pin ISP разъем и 10-pin ISP разъем

Atmega8 распиновка

В этом примере Turnigy Plush 18A ESC будет прошита в Windows с помощью ESC Flash Tool через USBasp.
Вам нужно подключить программатор к компьютеру, а ESC к программатору. Здесь проводники припаяны к ESC.