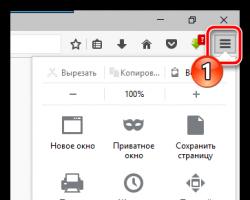
Описание комплекта, перечень модификаций
Нарушение порядка настройки аппарата зачастую приводит к авариям и поломкам. Пропуск любого из этих этапов может стать причиной «улета» или аварии аппарата.
1. Для сборки силовой части питания мультироторного аппарата Вам потребуется:
2. Припаяйте провода питания ESC к плате распределения питания.
3. Припаяйте провода от вилки подключения батареи к плате распределения питания. Если вы не уверены какого диаметра должна быть жила этого провода -используйте провод с жилой соответствующей диаметру жилы на используемой батарее или чуть больше. Убедитесь, что вилка питания припаяна правильно. Обычно используют провода двух цветов - красный подключается к плюсу, а черный к минусу батареи.
4. Припаяйте провода модуля питания автопилота к плате распределения питания.
5. Установите плату распределения питания на пластиковые стойки в центральной части рамы.
6. Закрепите аккумулятор ремешком -липучкой на нижней части рамы ровно по центру тяжести аппарата.
практические наблюдения: кусок двустороннего фольгированного текстолита с плюсом на одной стороне и минусом на другой, при соблюдении симметрии в пайке пар проводов дает лучшие показания по показателю влияния индуцируемых магнитных полей на компас. При этом, желательно, чтобы компас находился ровно по оси платы распределения питания, как можно выше. При аккуратном монтаже и расстоянии от PDB свыше 5см удается достичь менее 3% влияния индуцируемых магнитных полей на компас при полной мощности моторов ~500вт. (Это практически идеальный показатель).
7. установите полетный контроллер в центре рамы, таким образом, чтобы чип компаса оказался по осевой линии над платой распределения питания в соответствие с выбранной конфигурацией «икс» или «плюс». Необходимо постараться обеспечить максимальное расстояние от платы распределения питания и силовых проводов до компаса. При симметричной плате распределения питания достаточно 5см, при плохом качестве платы распределения может оказаться слишком мало и 10см.
Практические наблюдения: В связи с тем что современные прошивки Arducopter используют инерциальную систему для прогнозирования положения - задача защиты контроллера от вибраций обрела особую важность. с точки зрения размещения полетного контроллера, на наш взгляд, лучшее решение - использование утяжеленной плиты вибрационной развязки. основные компоненты такой конструкции: стеклотекстолитовая рессора, силиконовые амортизаторы, корпус батарейного отсека (служит опорой для монтажа автопилота) при этом батареи работают в качестве утяжелителя. автопилот крепится к виброзащищенной плите на два слоя двустороннего скотча на вспененной основе на 4 квадратика 1,5 * 1,5 см. Пример такой конструкции в серии фото http://sites.google.com/site/talon2v2/hexa-dji-800
Прозрачная пластиковая крышка над контроллером APM2 может уменьшить ущерб, а в случае аварии и защитить от влаги в условиях плохой погоды. При этом если вы решите сделать корпус герметичным - в нем следует предусмотреть отвод для выравнивания давления – в контроллере используется датчик давления
8. Установите приемник на раму и выведите антенну наружу. Как правило, у мультироторных аппаратов антенну следует ориентировать вниз.
Вставьте пять соединителей в каналы 1 - 5 приемника.
Обратную сторону соединителей подключите к разъему INPUTS. Сигнальные жилы (они обычно имеют белый или желтый цвет) - идут ближе к центру платы. Центральная жила +5V, крайняя жила обычно темного цвета – общий. Существует возможность упразднить соединение по +5V и общему проводу для всех каналов, кроме одного, при этом следует избегать одиночных соединителей, так как они легко выпадают. Если разъем приемника позволяет - удобно использовать 4 контактный шлейф для 1-4 каналов и 3 контактный для 5 канала питания и общего.
ОСТОРОЖНО: "HV приемники". В инструкциях к подобным приемникам сказано, что допускается подключать питание этих приемников напрямую к батарее. При использовании этого приемника на моделях с полетными контроллерами категорически запрещается подавать на рейку входов напряжение свыше 5,5 вольт. При подаче напряжения батареи на питание приемника и соединения питания приемника со входами автопилота высокое напряжение выведет автопилот из строя полностью. АПМ, на питание которого было подано напряжение батареи нецелесообразен в ремонте и требует полной замены.
9. Подключите управляющих шлейфы регуляторов моторов (ESC) в разъемы выходов (OUTPUTS) сигнальный провод светлого тона должен быть в сторону центра платы.
10. Существует мнение, что некоторые модели регуляторов оборотов с импульсными регуляторами напряжения 5 вольт могут некорректно работать, если соединены все плюсовые провода в сигнальных шлейфах, для чего средний провод на всех регуляторах, обычно отключают.
11. Ваш RC передатчик должен быть первоначально настроен для мультироторного аппарата по схеме, применяемой для управления самолетом :
1. Перейдите на http://firmware.ardupilot.org/Tools/MissionPlanner/ ,загрузите самую последнюю версию " Mission Planner " и установите ее на ваш компьютер.
Примечание: В работе программы "Mission planner" версий 1.3.7 -1.3.9 (и возможно более поздних) могут возникнуть трудности у пользователей с операционной системой Windows XP. Работоспособная версия для этой ОС 1.3.6
2.Запустите "
Mission
Planner
" и подключите USB кабель между ПК и полетным контроллером.
3. Если при этом система сообщит "Обнаружено новое устройство" - разрешите установку драйвера. Если в ходе установки вы получаете сообщение: «Драйвер не найден» установите его вручную из папки установки программы
Mission
Planner
.
Примечание: если драйвер не устанавливается, то попробуйте сначала установить FTDI драйвер
4. В " Mission Planner ", убедитесь, что в правом верхнем углу экрана, 115200 - выбрана скорость передачи данных и новый номер Com порта, который появился после установки драйвера (Но не TCP или UDP).
Примечание: при подключении через модем телеметрии обычно используется скорость 57600.
5. Инициализация начальных параметров
Если вы купили комплект заказав на нашем сайте под конкретный тип ЛА - сохраните настройки полетного контроллера в файл. (меню «config/tuning" пункт "advanced parameters" кнопка сохранить "SAVE")
(мы загружаем наиболее стабильные версии прошивок, делаем установку настроек по умолчанию и первичную калибровку инерциальной системы и компаса)
В случае если вы заменили предустановленную версию прошивки или приобрели автопилот не у нас, то первое, что следует сделать:
· загрузить свежую версию прошивки под ваш тип летательного аппарата.
· выполнить сброс настроек по умолчанию (в терминале setup - reset - y)
В прошивке версии 3.2 и старше терминал для контроллера APM не поддерживается, установка начальных параметров осуществляется из экрана "полный список параметров"
Предупреждение: невыполнение процедуры установки параметров по умолчанию - основная причина широкого круга неполадок на всех стадиях настройки и полета (могут не работать некоторые входные и выходные каналы, не приниматься данные GPS, неправильно работать ориентация). Если вы не уверены что сделали сброс настроек, повторите эту процедуру.
6. Для просмотра состояния контроллера, настройки параметров - нажмите кнопку Connect - в правом верхнем углу экрана, при этом начнется установка соединения MavLink.
7. В случае необходимости загрузки программного обеспечения под другой тип аппарата, укажите порт, скорость 115200 но не нажимайте подключить, перейдите на вкладку Inital setup - inslall Firmware где можно выбрать тип и версию загружаемой прошивки
1. Включите передатчик с настройкой на вашу модель, Убедитесь что триммеры в центральном положении.
2. В "Radio C alibration" выберите " Calibrate radio " и двигайте ручки управления до упора.
3. Переместите трех - шести позиционный переключатель выбора режима поочередно во все позиции.
4. Когда вы закончите калибровку, верните джойстики в среднее положение, а газ в 0 и выберите кнопку "
Complete
" в правом нижнем углу экрана.
5. Выберите "режимах полета" на левой стороне экрана "
Mission
Planner" и установите все 6 Режимов на «Stabilize», снимите все отметки "
Simple
" режима и нажмите кнопку "Save Modes".
Убедитесь что полученные калибровчные значения по каждому из каналов не выходят за пределы диапазона 1000-2000мс (это важно) желательно иметь небольшой запас, к примеру если по каждому из каналов вы получили 1100 -1900 с триммером ровно 1500 - это будет идеальным случаем
6. Настройте радиоприемник таким образом, чтобы при выключении передатчика сигнал в канале газа составлял 900мс, в INITAL SETUP - FAILSAFE следует включить опцию enabled always RTL. Эта опция будет означать что в случае потери сигнала радиоуправления аппарат будет возвращаться к точке взлета. В случае если в момент пропажи сигнала аппарат будет в полете, но ниже 15м, аппарат предварительно наберет эту высоту.

настроенную систему следует проверить, Уровень сигнала в канале 3 должен падать ниже чем занчение FS pwm - при отключении передатчика на главном полетном экране должна появляться надпись Failsafe.
Функционал калибровки компаса находится во вкладке «Initial Setup», раздел «Mandatory Hardware» , «Compass». Включение компаса - «Enable», опция «Auto Dec» разрешает рсчитывать автоматически магнитное склонение. При использовании встроенного компаса в поле «Orientation» следует выбрать «APM with OnBoard Compass»

Далее необходимо провести калибровку. Для этого следует выбрать пространство подальше от металлических предметов (рабочий стол с инструментом, ножницы, магнитные отвертки) , нажать кнопку « Live Calibration ». Появится окно хода калибровки компаса, в ходе калибровки необходимо вращать аппарат в плоскости горизонта на 360 градусов, удерживая поочередно каждую из осей XYZ полетного контроллера в вертикальном положении.
Видео процесса калибровки (на английском):
По окончании отсчета в 60 секунд появится окно, с результатом калибровки. Результатом могут быть два типа сообщений успех или неудача. Если вы получили сообщение что недостаточно данных, то процедуру следует повторить еще раз. В случае успешной калибровки, будут показаны результирующие офсеты (они должны быть не хуже +-150). Если отклонения больше, то следует искать источник магнитного поля, вносящий ошибку в показания компаса. Иногда на сенсор магнитного поля влияют соседние компоненты, размещенные рядом с ним на печатной плате. Самыми хорошими считаются значения, близкие к нулю. Существует специальное оборудование для размагничивания намагниченных предметов находящихся вблизи сенсора магнитного поля.
Проверка компаса на кресто-тесте:
после того как компас откалиброван, уберите подальше от рабочего места магнитные предметы в том числе отвертки и ножницы. Нарисуйте на листе крест с линиями под углом 90 градусов. Разместите аппарат таким образом, чтобы индикатор в "Flight data" показывал точно на "N" (соответствие реальной стороне света на этом этапе не важно, на вашем рабочем месте все равно могут быть магнитные аномалии, их легко выявить механическим туристическим компасом)
поверните крест таким образом чтобы одна из линий стала параллельно контроллеру - и не двигая лист бумаги разверните контроллер на 180 и положите вдоль черты.
сначала курс будет показывать "S" - юг в любом случае т.к. это значение определяется по гироскопу, затем со скоростью порядка градуса в секунду показания гироскопа будут подтянуты к показаниям компаса, итак если после 30 секунд если вы видите тот же юг, с небольшим допуском - значит компас откалиброван верно, повторите эксперимент для перпендикулярной линии для проверки направлений на запад и восток.
После первого "арминга" при захвате позиции GPS контроллер автоматически рассчитает магнитное склонение.
при этом показания компаса должны измениться на угол порядка 7 градусов относительно показаний магнитного туристического компаса (для центральной части России)
Проверка компаса на предмет точности указания на реальные стороны света:
Если на карте встроенной в «
Mission
Planner
» возможно установить масштаб при котором видны контуры здания в котором вы находитесь - установите аппарат в положение параллельное одной из стен и убедитесь что красная линия строго параллельна стене вашего здания по карте. Поворачивайте аппарат на 90, 180, 270 градусов и контролируйте что красная линия строго параллельна или перпендикулярна стене. ошибки в 1-2 градуса допустимы, при ошибках более 5 градусов будет заметны проблемы в режиме удержания позиции, при ошибках более 15 градусов категорически не рекомендуется использовать режим удержания позиции или автоматические режимы
Примечание: На APM1 и APM2.6 компас- отдельно устанавливаемый модуль, на APM2 и APM2.5 и наших контроллерах он уже установлен
. В случае необходимости использования внешнего компаса при наличии внутреннего на платах нашей редакции следует разрезать перемычку отключающую внутренний компас
17. Выберите « Initial Setup », открываем раздел « Mandatory Hardware » « Accel calibration ». устанавливайте поочередно аппарат в требуемые положения и подтверждайте действие нажатием клавиши на клавиатуре (пробел) будут запрошены следующие положение горизонтальное, на левый бок, на правый бок, носом вниз, носом вверх, вверх ногами.
Для достижения идеальной калибровки, необходимой для точной работы инерциальной системы, рекомендуем при калибровке акселерометра использовать ровную поверхность с проверенной горизонтальностью при помощи пузырькового строительного уровня. В момент нажатия подтверждающей клавиши контроллер должен быть зафиксирован в состоянии покоя, нельзя его держать в руках или пытаться калибровать на поверхности подверженным даже минимальным вибрациям.
Проверка компаса на предмет влияния на его показания мощности моторов:
Если в ходе полетных тестов при удержании позиции происходит разгон аппарата по дуге - одной из наиболее вероятных причин является отклонение компаса при работе моторов под нагрузкой. для того чтобы убедиться в отсутствии такого влияния следует надежно закрепить аппарат и в режиме контроля направления красной линии в программе « Mission Planner » следует поочередно давать полную мощность на каждый из моторов. Если в ходе проверки при мощной нагрузке красная линия отклоняется более 5 градусов следует пересмотреть конструкцию платы распределения питания, попытаться закрепить контроллер дальше от проводов или использовать выносной компас.
В ходе теста моторы должны работать под нагрузкой т.е. с установленными пропеллерами. Некоторые моделисты вместо того чтобы закрепить аппарат изменяют направления вращения моторов или переворачивают винты с тем чтобы винты не отрывали аппарат от земли а наоборот воздействовали вниз.
Тест опасен. Берегите пальцы. Изолируйте домочадцев и питомцев. Берегитесь занавесок, они проявляют удивительные летные способности в ходе этого теста.
В случае когда из за конструктивных особенностей летательного аппарата не удается исключить влияния магнитных полей создаваемых проводкой на встроенный компас, существует возможность подключить внешнее устройство. В случае приобретения комплекта APM нашего производства внешний компас уже имеется на плате навигационного приемника.
Перед его подключением следует отключить встроенный, для этого необходимо вскрыть корпус APM и разрезать перемычку. После разрезания перемычки убедитесь что встроенный компас перестал функционировать (на экране Mission planner вы увидите сообщение BAD COMPASS HEALTH).
Соедините гнездо I2C контроллера с гнездом "compass" навигационного модуля при помощи шлейфа входящего в комплект.
Укажите конфигурацию компаса "external" в настройках Mission Planner. Для контроллера APM эта настройка эквивалентна установке компаса с поворотом roll 180 и предусматривает выбор этой опции поворота (для контроллеров F4BY, Pixhawk иная трактовка, при указании external следует оставлять 0 поворот)
Настройка диапазонов управляющего сигнала регуляторов оборотов двигателей (в просторечие калибровка ESC) имеет важное значение для правильной работы. Признаком неверной калибровки регуляторов может быть не одновременный старт моторов при медленном добавлении газа после арминга.
Есть два способа регулировки "концевых точек ESC" (точка нулевой позиции и максимального газа).
Попробуйте сначала настройку в автоматическом режиме, если это не удается, тогда используйте второй способ.
Требуется снять пропеллеры или обеспечить безопасность при случайном включении моторов иным способом
При последующих включениях, всякий раз перед включением питания аппарата следует убедиться, что передатчик включен, газ в минимуме. Иначе может начаться процедура повторной калибровки.
4. Иногда, даже после того, когда выполнена ручная калибровка, ESC могут оставаться не инициализированными при включении (непрерывный громкий звуковой сигнал).
Если это так, то попробуйте одну автоматическую калибровку.
5. Обычно, если ESC правильно откалиброван, когда вы включаете аккумуляторную батарею, не должно быть непрерывного тикающего звука двигателей.
Перед включением питания обеспечьте неподвижность аппарата, не следует аппарат включать удерживая в руках т.к. это может привести к обнаружению ошибки калибровки гироскопов. После включения питания после того как двигатели пропищали, индикаторные светодиоды указали что процесс калибровки завершен, позиция GPS захвачена, переведите ручку управления газом двигателей, удерживая все время вниз и вправо 4 секунды. При этом красный светодиод должен прийти из мигающего состояния в постоянное свечение. Это режим «вооружения» («
Arming
»), он используется для предотвращения травм от случайного включения моторов, только в этом режиме возможен запуск двигателей.
7. Для «Разоружения», удерживайте дроссель вниз и влево на 4 секунды.
8. Если моторы не «Вооружаются», проверьте что триммер курса в центре, попробуйте опустить триммер газа на несколько щелчков ниже и повторите попытку. Современные прошивки имеют систему предотвращения включения двигателей, в случае если контроллер неисправен, не выполнены описанные выше калибровки акселерометра, компаса, аппарат дернули при включении и гироскоп не смог откалиброваться, если GPS приемник не захватил позицию. Мы не рекомендуем
отключать эти проверки, изменяя параметр Arming check
9. После « Arming », двигатели должны стартовать одновременно и набирать обороты пропорционально перемещению ручки газа. Если это не так, вы должны повторить калибровку ESC снова.
1.На мультироторные летательные аппараты устанавливаются попарно пропеллеры левого и правого вращения, не используйте пропеллеры разного шага, диаметра. Если вы еще не определились с выбором - обратите свое внимание на пропеллеры производителя APC серии MR
2. До установки пропеллеров включите передатчик, подключите батарею и проверьте, и в случае необходимости исправьте направление вращение каждого из двигателей, так чтобы они вращались в направлениях как показано на схеме, а затем установите винты. Для изменения направления вращения мотора следует поменять местами любые две из трех фаз соединения двигателя с регулятором.
3. Для мультироторных аппаратов крайне важно использовать идеально отбалансированные пропеллеры. Такие пропеллеры создают минимум вибраций для полетного контроллера.
стрелка по центру рамы указывает направление "вперед" у полетного контроллера
CW – пропеллер, вращающийся по часовой стрелке, CCW - против

квадрокоптер икс и плюс схемы
гекса и октакоптер, икс и плюс схемы
,
6 моторная конфигурация соосной схемы
8 моторная конфигурация соосной схемы "октаквайд"
Предполетные проверки
При отключенной батарее, подключите кабель USB, запустите « Mission Planner » и выберите « Connect » и выполните осмотр индикаторов.
Эта проверка подтверждает, что датчики работают нормально, и контроллер верно установлен на раме, если двигатели и пропеллеры подключены правильно, аппарат можно считать способным к первому пробному полету.
В безветренный день установить аппарат в нескольких метрах от себя на ровном, горизонтальном месте, имея не менее 6 метров свободного пространства во всех направлениях.
Включите передатчик, убедитесь, что газ убран, триммеры в средней позиции, режим - STABILIZE, а затем подключите батареи бортового питания. Находясь, по крайней мере, в 3 метрах позади аппарата, выполните «арминг», удерживая дроссель вниз и до упора вправо не менее 4 секунд, пока красный индикатор не будет гореть непрерывно. В случае если полетный контроллер не прошел все калибровки указанные выше - «арминг» может не происходить. После того как красный сигнал загорелся -медленно увеличивайте газ до начала вращения двигателей (все моторы должны стартовать одновременно). Далее медленно увеличивайте газ таким образом, чтобы не было отрыва или движения. С помощью руля (курса) проверяется правильность поворота влево и вправо. Рама должна правильно выполнить ваши команды. Теперь проверьте ручку пикирования (Pitch
),. Когда двигаете ручку вперед (вверх) аппарат должен стараться наклониться вперед и попытаться уйти от вас. Двигая ручку к себе, на кабрирование модель должна пытаться наклониться и двигаться к вам. Ручкой крена (Roll
) проверьте перемещения влево и вправо – перемещения модели должны соответствовать направлению ручки. Устраните любые выявленные проблемы, прежде чем перейти к дальнейшим шагам.
· Не летайте над людьми, даже если аппарат весит менее килограмма, в случае аварии травмы неминуемы.
· Сделайте до первого полета табличку с номером мобильного телефона и прикрепите к модели. В случае причинения ущерба другим лицам нужно уметь отвечать за свои действия. В случае находки вы сможете договориться с нашедшим о вознаграждении.
· В процессе сборки, отладки и запуска берегитесь винтов, жесткие винты диаметром свыше 8 дюймов серьезно опасны.
· Законодательство многих стран позволяет запуск моделей не выше 100м, существенно превышая эту высоту вы рискуете не только потерять модель но и спровоцировать авиа происшествие с человеческими жертвами. Прим. законодательство РФ не предусматривает запуск авиамоделей с радиоуправлением, тем самым граница полетов по высоте не определена. Существуют ограничения запрещающие полеты вблизи аэропортов и других закрытых для полетов зонах.
· Литиевые батареи взрыво-пожаро-опасны. Причиной взрыва может быть замыкание силовых проводов, перезаряд, переразряд, механическое повреждение внешней оболочки, внутреннее замыкание. Не носите и не храните батареи без индивидуального чехла, может произойти замыкание о металлический предмет. Не пытайтесь разобрать или проткнуть вздувшуюся батарею там водород, она взорвется. Тушить батарею водой все равно, что машину бензином – литий горит в воде. Возгоревшиеся или дымящие батареи лучше отбросить в безопасное место.
STABILIZE
является основным и режимом и обязательным условием во время включения и необходимым для «Арминга» .(в свежих прошивках сделали допустимым арминг и взлет в режимах отличных от стабилизации, тем не менее первый взлет следует осуществлять а режиме стабилизация)
1. Попробуйте короткий полет в режиме стабилизации. Выполните «арминг» контроллера, удерживая дроссель вниз и вправо не менее 4 секунд (при этом красный светодиод перестанет мигать и станет гореть постоянно).
2. Увеличивайте газ до тех пор пока аппарат не начнет отрываться от земли. Попробуйте поднять модель на высоту от 1 – 2 метра над землей и некоторое время удерживать ее плавно дозируя газ. Компенсируйте дрейф креном и тангажем. Снизьте газ и совершите посадку.
3. Если в вышеописанном тесте ваш аппарат не достаточно хорошо стабилизировался, был подвержен раскачке - отсоедините батарею, подключите USB кабель между APM2 и вашим компьютером, запустите « Mission Planner» и нажмите « Connect », выберите вкладку « Config / tuning », « Extended tuning »,
А затем в списке PID следует найти параметр « rate roll P » « rate pitch P » . Уменьшайте его значение, но не более 10% за один раз, одновременно с этим увеличивайте значение « rate roll D » « rate pitch D » также по 10% за один раз от исходного. Более подробно процесс настройки PID описан ниже, в разделе тюнинг.
4. Повторите эту проверку несколько раз, добавив проверку управляемости по ролу и питчу, совершите несколько коротких полетов на небольшие расстояния.
5. Постарайтесь привыкнуть к поведению модели в режиме "Стабилизация" и получить навыки управления, прежде чем приступать к тестированию более продвинутых режимов.
Модель удерживает позицию отличающуюся от горизонтальной, аппарат уносит вперед, назад и ли в сторону при безветрии.
Закрепите контроллер горизонтально или используйте параметры AHRS TRIM для компенсации наклона полетного контроллера относительно рамы. следует учесть что угол AHRS TRIM задается в радианах. На ардукоптере категорически запрещается использовать триммер пульта управления для компенсации сноса аппарата.
Проверка уровня вибраций, и проба режима удержания высоты
Для того чтобы оценить какова диаграмма вибраций на вашем аппарате включите логгирование RAW значений, совершите 30 секундный полет в режиме стабилизация, скачайте логи, загрузите скачанный файл через функцию просмотра логов и выведите параметры accel x y z в диаграмму. В новых прошивках лог вибраций называется IMU
включение логгированния перед полетом:

следует выбрать «IMU»
в старых версиях Mission Planner c ледует выбрать "Default + IMU"в «full parameters list» следует найти ins_mpu6k_filter и задать значение 43гц
Для скачивания полетных логов в компьютер в прошивке Arducopter 3.1 возможно использовать функционал окна терминал, для прошивки 3.2 и старше для контроллера АПМ терминал не доступен, скачивание логов возможно через протокол « MAVLINK »

В результате анализа полученного лога получаем такие диаграммы

На верхней картинке приведены крайне недопустимые вибрации,
В случае если вибрации на вашей раме слишком высоки полетный контроллер не сможет обеспечить удержание высоты, используя инерциальную систему, до устранения причин возникновения вибраций и установки полетного контроллера на виброзащитную платформу включение режима ALT HOLD и других автоматических режимов может быть опасным.
В случае если вибрации невелики, то для большинства аппаратов мы рекомендуем установить аппаратное подавление шумов от вибраций ins_mpu6k_filter=20 , для полетов не связанных с измерением уровня вибраций
Проверка качества удержания позиции (GPS координаты + высота)
будьте внимательны, нельзя приступать к тестированию режимов удержания высоты, позиции, возврата не завершив предыдущие этапы полетных настроек!
Качество удержания позиции зависит:
В случае если аппарат не удерживает позицию и иногда вместо удержания позиции начинает разгоняться по дуге - наиболее вероятная причина неверная работа компаса в условиях полета.
Слишком большой радиус удержания позиции - перемещение аппарата в произвольных направлениях. Тут два фактора.
1. Следует проверить, что навигационный приемник ловит от 10 спутников и более, имеет уровень
HDOP
< 1,2
2. Уровень вибраций по осям X Y не превышает нормы, современные прошивки используют данные акселерометров для калькуляции перемещений, сильные вибрации приводят к ошибкам в работе инерциальной системы
После замены прошивки контроллера войдите в терминал и выполните процедуру инициализации начальных параметров (терминал, setup, reset) . без этого могут не включаться моторы, криво показывать уровень, не работать телеметрия и многое другое - совершенно любые проблемы.
вес аппарата и его винтомоторная группа должны быть подобраны так чтобы он висел на 50% газа, рекомендуемый диапазон уровня газа висения от 43% до 57%, при уровне газа висения 30-40% аппарат недогружен и очень сильно реагирует на управление, как правило, требуется загрубление за счет настроек. При уровне газа висения свыше 70% аппарат, как правило, не способен быстро стабилизироваться, склонен к раскачке, неспособен удерживать высоту в условиях турбулентности, нисходящих потоков. Посмотреть какой у вас газ висения возможно грубо по ручке управления, точно по параметру «throttle trim» после полета, там это значение должно быть 430 - 570 , чем ближе к 500 тем лучше.
Пример, что бывает если тяга неверно подобрана к весу аппарата:
2кг аппарат с рамой 550, ax4008, apc14*4.7 сначала с батареей 2S – высокие значения PID , аппарат стабилизируется по крену и питчу, но был приличный ветерок 5-7 м/с причем из за рваной облачности с ниспадающими потоками. так вот один такой поток его прихватил и прижал к земле с приличной высоты, по логам высота падает, газ полный, два мотора на минимуме, два работают на 100% (их задувает боковой ветер) аппарат в горизонте но идет к земле. в результате мягко впечатался в снег. параметр throttle trim оказался порядка 800. после поставил 3S батарею снизил rate p и d аппарат стал управляться как пушинка. throttle trim оказался порядка 450 т.е. на будущее можно догрузить более тяжелой батареей
за уровень курсовой стабилизации отвечает коэфициент - rate yaw p. Слишком большой параметр стабилизации по курсу может вызывать нарушения стабилизации по уровню, поэтому на начальной стадии настройки указанный по умолчанию параметр желательно уменьшить. Это особенно актуально если на раме установлены максимально допустимые размеры пропеллеров - например, если на раме с диагональю 550 установить 14-дюймовые пропеллеры то уменьшают вдвое - иначе аппарат может даже кувыркнуться на старте. Если впоследствии если вы сочтете что курсовое управление не достаточно интенсивно - этот параметр можно увеличить.
AHRS_GPS_GAIN,0 Параметр дает указание системе коррекции горизонта о том сто необходимо корректировать центрифугальные ускорения в крутых виражах на скорости. Значение 1 = включена коррекция, 0 = выключена.
Следствием включенного этого параметра является подергивание линии горизонта при неподвижном аппарате, если GPS не идеально захватил позицию и дрейфует. При сильных скачках позиции GPS крен может достигать критических значений.
в коптерах этот параметр установленный в единицу не нужен, параметр требуется самолетам. Исключение высокоскоростные аппараты для пилотажа в акробатическом режиме.
INS_MPU6K_FILTER,20 аппаратный «виброподавитель», включают после того как измерили вибрации на раме, убедились что они в норме, а затем включают «шумодав». Значение 43 означает что используется низкий уровень подавления (43гц) это значение следует использовать для тестового полета с включенным логированием вибраций. Если амплитуда вибраций в пределах 2 единиц по 10 ед шкале - можно включить фильтрацию 20 для большинства рам. Исключение могут составлять очень быстрые, маневренные, спортивные аппараты для 3д пилотажа.
4. Настройка управляемости и стабильности по питчу и крену:
Раскачка бывает нескольких видов – мелко дрожащая когда моторы меняют свой тон многократно в течение секунды и висит как на струне мелко дрожа - это перекачанный или rate d (реже rate p)
если аппарат трудно взлетает любой ветерок его плавно отклоняет из стабильного положения (ведет себя как брошенный на пол обруч - волной по окружности) это недостаточный rate D (если аппарат не взлетает и ведет себя как брошенный на пол обруч - проверьте соответствие подключения моторов и тип рамы плюс или икс)
если висите ровно ветра нет а он чуть чуть дергает то одним лучом то другим раз в секунду то вероятно великоват rate d (или вибрации оказывают влияние на автопилот)
если аппарат принудительно немного качнуть стиком а он вместо того чтобы выполнить маневр в одно движение делает один-два затухающих качка это значит маловат rate d
Регулировка зависимости коррекции мощности моторов от угловой скорости (в осях питч, крен, курс)
roll pitch rate p
- определяет сколько мощности дать на преодоления инерции рамы - угловой скорости по питчу и ролу - чем инертнее рама и меньше тяга вмг тем больше порядок значения для большинства конфигураций 0,10 - 0,15
roll pitch rate d
- определяет дозирование энергии на раскрутку и торможение пропеллера - чем больше диаметр пропа и меньше момент мотора тем параметр больше. порядок значения для большинства конфигураций 0,004 - 0,010
rate пиды меняют за раз на 10% не более! не делайте на глаз посчитайте на калькуляторе
roll pitch stab p параметр определяющий резкость управления от пульта и автомата навигации. для спортивных моделей порядок значения 4.5; для аэрофото и учебных 3.5
P I D составляющие применительно к ардукоптеру
присутствуют в большинстве коэффициентов.
P - основной пропорциональный коэффициент.
D - уровень первоначального, краткосрочного воздействия (как как правило направлен на преодоление инерции)
IMAX - уровень коррекции долгосрочно сохраняемой ошибки
I - величина (скорость) нарастания величины ограниченной IMAX
Признак: Апм не завершает подключение по юсб и телеметрии, в ходе процедуры загрузки параметров процесс останавливается, при включении синий светодиод мигает и гаснет, другие светодиоды не перемигиваются. С прошивками 2.7 и более ранними контроллер соединаяется с Mission Planner.
Диагностика: проверить наличие напряжения 3.3 вольт на крайних контактах разъема I2C, нормально если напряжение 3.2 - 3.4 вольта. Если там сушественно меньше к примеру 1 вольт или больше например 4,8 вольта - у вас вышел из строя стабилизатор 3.3 вольта. В оригинальных автопилотах Diydrones используется регулятор который часто выходит из строя. Эта проблема не типична для АПМ модифицированный группой Мегапилот, мы заменили стабилизатор 3.3 на более надежный чип.
Ремонт: замена стабилизатора 3.3 вольт
Признак: В холодную погоду уровень показываемый АПМ уходит от горизонтали при горизонтальном положении аппарата.
Возможные причины : 1. Неисправность процессора ориентации MPU6000. 2. Установлен низковольтный конденсатор в цепь chargе pump MPU6000. Утечка тока изза конденсата или окислов на плате в высоковольтной цепи chargе pump.
ремонт: следует выпаять процессор ориентации MPU6000, промыть посаднчное место и запаять обратно, заменить конденсатор С13 на конденсатор емкостью 0,01мкф на напряжение 50 вольт. Конденсатор на плате находится между MPU6000 и барометром.
Признак: Bad compass Health - красная надпись на экране программы Mission Planner. Переводится как компас нездоров.
Возможные причины: 1. Компас неисправен или неподключен. 2. Подключен внешний компас при не разрезанной перемычке отключающей внутренний компас.
Признак: Bad gyro health - красная надпись на экране Mission Planner. Неполадки гироскопа.
Возможные причины :
1. Если при этом уровень перекошен - Неисправность процессора ориентации MPU6000.
2. С прошивкой Arducopter 3.2 и старше эта ошибка появится в случае если вы нарушили неподвижность контроллера в момент калибровки гироскопа при включении. В этом случае - это неисправностью не является. перевключите контроллер повторно. Нельзя удерживать полетный контроллер в руке при включении в течении периода калибровки сенсоров.
Http://apmcopter.ru/
хештэги
#докуентация
И не писал обзоры, от части из за не хватки времени, от части из за ситуации в Украине:(
В общем выдался свободный вечер и решил написать обзор, по моему любимому контроллеру , так как набралось большое количество видео материала по настройке и сборке.Но думаю писать я буду по минимум, за то будет очень много видеороликов, не зря же я столько работы проделал:)Нус, начнемс.
Контроллер АРМ на сегодня самый многофункциональный и не дорогой, его используют чаще всего на мультикоптерах (прошивка Arducopter) и на самолетах (прошивка Ardupilot) а также поддерживает автомобиль и вертолет, в общем вот платформы которые поддерживает контроллер:У АРМ самое большое количество полетных режимов из всех контроллеров что есть на рынке, возможность управлять дроном с помощью смартфона или планшета, при этом открывается огромный функционал: создание полетного задания, управление, переключение режимов, мониторинг и телеметрия с указанием всех данных, и многое другое… Минус этого контроллера в том, что он не летает из «коробки», а требует знаний и серьезной подготовки.Но я в своих видео максимально просто и подробно постарался объяснить от А до Я, надеюсь поможет новичкам, и будет полезен людям кто решил освоить АРМ.
В данной статье и видео будет рассмотрено подключение контроллера к квадрокоптеру, в дальнейшем будет такой же видео курс по Ardupilot то есть по установке на самолет.
В апреле месяце появился на Бангуде полный комплект за соблазнительные 137 доллара, на то время это была наверное самая низкая цена за такой комплект.
Я конечно ожидал подвоха за такую цену, но жабка одобрительно кивнула и ее в последствии не разочаровал, комплект оказался качественным, и все сразу работало.Посылка дошла очень быстро, даже двух недель не прошло.
Комплект поставки в себя включал: контроллер АРМ уже с коробочкой, демпферная площадка под контроллер,GPS модуль с магнитометром в корпусе и со стоечкой, радиотелеметрия 433мГц,Minimosd и Power Module, не плохо за такую сумму:) (видео с распаковкой и комплектацией выше в начале статьи) Единственное чего нет в комплекте, и будет нужно для прошивки ОСД это FTDI программатор, его можно купить там же на Бангуде,

Первое что желательно сделать это прошить PPM-encoder, это нас сразу убережет от дальнейших танцев с бубном.В любом случае всегда желательно залить свежую прошивку PPM-encoder для правильной отработки при фалсейве.Инструкция по прошивке:
Так же можно сразу залить правильный конфиг в модуль GPS, хоть в данном наборе ГПС работал нормально, я все равно перестраховался.Инструкция по настройке GPS:
Приступаем к сборке, подключению и прошивке самого контроллера.Подробно в этом видео:
После подключения и прошивки, необходимо настроить Пиды квадрокоптера.
Простая настройка PID значения Pitch and Roll с помощью крутилки на аппаратуре:
После настройки пидов, пришло время подключить радиотелеметрию.Подробно о использовании телеметрии с смартфоном или планшетом, а так же о полетных режимах и настройки Фалсейва:
Теперь после всех настроек можно подключать Power Module, но его мы будем использовать только как датчик тока.Видео о настройке и по подключению:
Пред подключением ОСД и использования квадрокоптера для FPV полетов, стоит задуматься о правильном питании контроллера.Так как все отказы АРМ происходят именно из за плохого питания.Подробно о правильной запитке контроллера:
Настало время подключить MinimOSD.Подробно о прошивке, настройке и подключению:
Теперь можно летать и радоваться:)
Надеюсь вам понравился мой вариант статьи: Мало букаФ-Много фильмов:)
Пройдя поэтапно все настройки согласно моих видеоинструкций, вы наверняка взлетите.Думаю видео материала вам будет достаточно для постижения дзена контроллера АРМ, и целого дня чтоб все пересмотреть.
Ставим лайки кому понравилась проделанная работа по видеоурокам, а так же чтоб у меня был стимул сделать подобный курс по Ардупилоту.
Не каждый собранный комплект GPS+APM способен сразу и полноценно выполнять авто пилотирование, имею ввиду режимы RTL, полет по точкам или лойтер. Можно встретить много жалоб и вопросов в интернете "включил режим loiter, а коптер улетел в неизвестном направлении". У меня была другая ситуация: самолет - включил возврат домой, а он резко направился в землю (без FPV). Выгрузил лог из APM и выяснилось, что показания высоты GPS сильно менялись каждые 2-3 минуты, с начало 450 м затем 660 м и количество видимых спутников скакало с 6 до 10, т.е. в режиме возврата домой полетный контроллер опирается на данные со спутников, вот и решил, что высота запуска (дом) 450 м, а был самолет на высоте 660 м (это город у нас на возвышенности, полет проходил на высоте 20 м от земли) и решил вернуть его на нужную высоту. Пробовал просто ходить по стадиону c GPS+APM затем смотрел лог, записаные данные - ужас, то якобы на 2 метра под землей, а затем за 2 минуты как по лестнице поднялся на 80 метров! То, что GPS модуль не работает нормально это понятно, но хотелось бы, без опасения, пользоваться другими функциями APM которые не связаны с ним.
Поэтому тестируя новый (еще не опробованный) APM с GPS будет удачно использовать следующие режимы в определенной последовательности:
Чтоб избежать резких смен высоты в режиме RTL необходимо в конфигурацию внести параметр ALT_HOLD_RT=-1 означающий - сохранять текущую высоту в режиме полета домой.
Возможно не все знают что, начиная с APM 2.5 можно устанавливать "вверх ногами", точнее устанавливать можно любой стороной, это очень удобно в условиях ограниченного пространства. Параметр отвечающий за положение (ориентированность) APM в пространстве AHRS_ORIENTATION.
Чтобы установить APM 2.6 вверх ногами:
В Mission Planner - Config/Tuning - Full Parameter List - Искать (find), ищем AHRS_ORIENTATION и устанавливаем значение AHRS_ORIENTATION=8
Одна из популярнах на сегодняшний день моделей самолета для FPV это Bixler (Skywalker). Легко собирается, легок в управлении, легко поддается самому сложному ремонту. Обладая "скошенным", полукруглым дном фюзеляжа установка APM весьма неудобна. Большая часть свободного места фюзеляжа как правило уходит под аккумуляторы (основной и для видео передатчика). Особенно удобно устанавливать APM на Бикслер вверх ногами, под крышку "кабины".
Прежде чем сделать свой первый полет даже в ручном режиме мне потребовалось достаточно долго повозиться с настройкой Ardupilot APM 2.8. Надо сразу отметить, что данная версия имеет отличия от предыдущей 2.6 по расположению разъемов и их назначению. Особенно это касается подключения внешнего компаса.
После загрузки прошивки уже можно устанавливать соединение с Ardupilot и делать дальнейшие настройки через USB.
Первое что я делал в настройке Ardupilot APM 2.8 - это калибровка акселерометра и калибровка радиопередатчика. Эти настройки одни из самых простых, никаких проблем и нюансов там не возникает. Поэтому подробно описывать процесс смысла нет. Все инструкции даны на сайте разработчиков:
Чуть менее понятная, хотя на деле все так же нетрудная, калибровка регуляторов хода ESC. Чтобы подружить плату APM 2.8 с регуляторами хода и добиться точного управления моторами потребуется несложная последовательность действий:
Во-первых, снять пропеллеры с моторов из соображений безопасности.
Моторы должны быть установлены на раме, подключены к регуляторам, те в свою очередь подключены к плате Ardupilot.
Плату APM не нужно подключать к компьютеры ни по USB, ни по радиоканалу.
1. Включаем передатчик радиоуправления (на момент калибровки регуляторов радиоуправление должно быть уже откалибровано). Высталяем ручку газа на максимум.
2. Берем Li-Po аккумулятор и подключаем к разъему Power-модуля для включения автопилота. Питание регуляторов соответственно тоже будет обеспечивать этот аккумулятор.
3. После включения APM будет мигать своими синими и красными светодиодами как полицейская машина. Этим он сигнализирует готовность к калибровке при следующем включении. Отключаем аккумулятор от Power-модуля.
4. Включаем питание заново. Регуляторы издают стандартный звуковой сигнал (обычно количество сигналов равно количеству банок в батарее) и через некоторое время дважды издает короткий сигнал, что подтверждает калибровку по максимальному газу.
5. Опускаем ручку газа в минимальное положение. Регуляторы издают один долгий сигнал, что подтверждает калибровку по минимальному газу.
6. С этого момента калибровка регуляторов для APM 2.8 завершена и можно проверить работоспособность моторов.
7. Убираем газ на минимум и выключаем питание Ardupilot.
Данная процедура проводит калибровку регуляторов по схеме "все за раз", что достаточно для большинства моделей ESC.
Что касается калибровки компаса, то тут все посложнее. На плате APM 2.8 есть встроенный внутренний магнитометр, который, в принципе, может быть использован как основной компас. Но т.к. у меня имеется внешний магнитометр в одном корпусе с GPS приемником, мне лучше использовать его. Важный момент в подключении внешнего компаса: на плате APM 2.8 для него предусмотрен отдельный разъем прямо под разъемом для GPS антенны. Поэтому подключаем его туда, а не в разъем 12C, как на более старых версиях.

Сначала я попытался провести калибровку компаса APM 2.8 по стандартной схеме, не задумываясь о совместимости внешнего и внутреннего компаса. Этого сделать не удалось. Сам процесс калибровки хоть и не выдавал ошибки и значения в трехмерной системе координат появлялись на экране, все же набор этих значений был абсолютно некорректным, я бы даже сказал неадекватным. Для нормальной калибровки потребовалось отключить внутренний компас APM 2.8 . Это делается просто: нужно вынуть перемычку справа от разъема GPS. Просто избавиться от нее.
С этого момента внутренний компас перестает работать и в калибровке участвует только внешний.
Без внутреннего компаса на экране показывает ошибку Compass 1 error: 99 , но это никак не мешает процессу калибровки внешнего.
Для первой калибровки отключите галочку Use Auto Accept внизу окна, чтобы собрать побольше значений. Набрав 2000 -2500 значений по всей сфере, можно заканчивать калибровку.
На этом основные настройки связанные с оборудованием закончены. Вся дальнейшая работа предстоит в основном по настройке параметров для корректного поведения в полете.